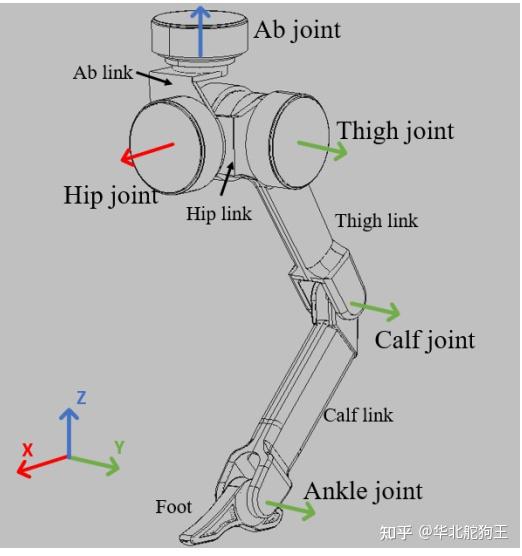
双足机器人原理图

一种高能效轻量化结构双足机器人的逆运动学求解方法
图片尺寸1751x1611
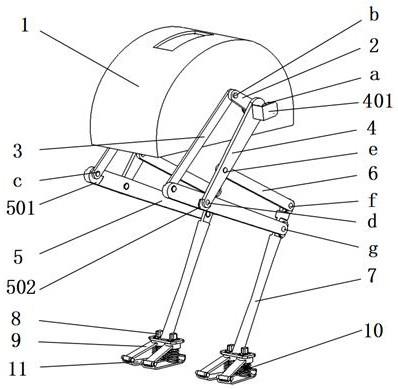
一种双足步行机器人
图片尺寸1619x2499
一种双足行走机器人的制作方法
图片尺寸1000x882
小型双足步行机器人的结构及其控制电路设计
图片尺寸1150x793
一种双轮足混合自平衡机器人的制作方法
图片尺寸1000x887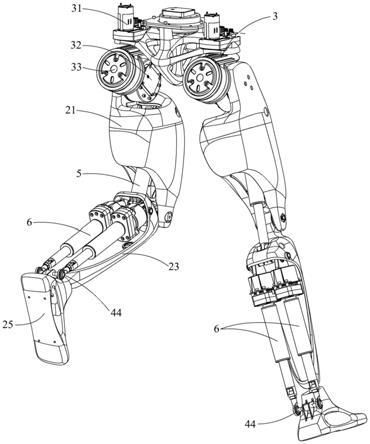
一种双足机器人的制作方法
图片尺寸370x444
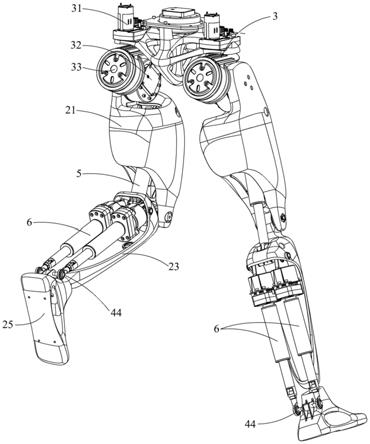
cn210555244u_一种欠驱动液压双足机器人下肢机构有效
图片尺寸801x1000
一种双足机器人控制系统及双足机器人的制作方法
图片尺寸1000x727
super-m 双足舞蹈机器人_北京智能佳科技有限公司-中国智能服务机器人
图片尺寸750x620
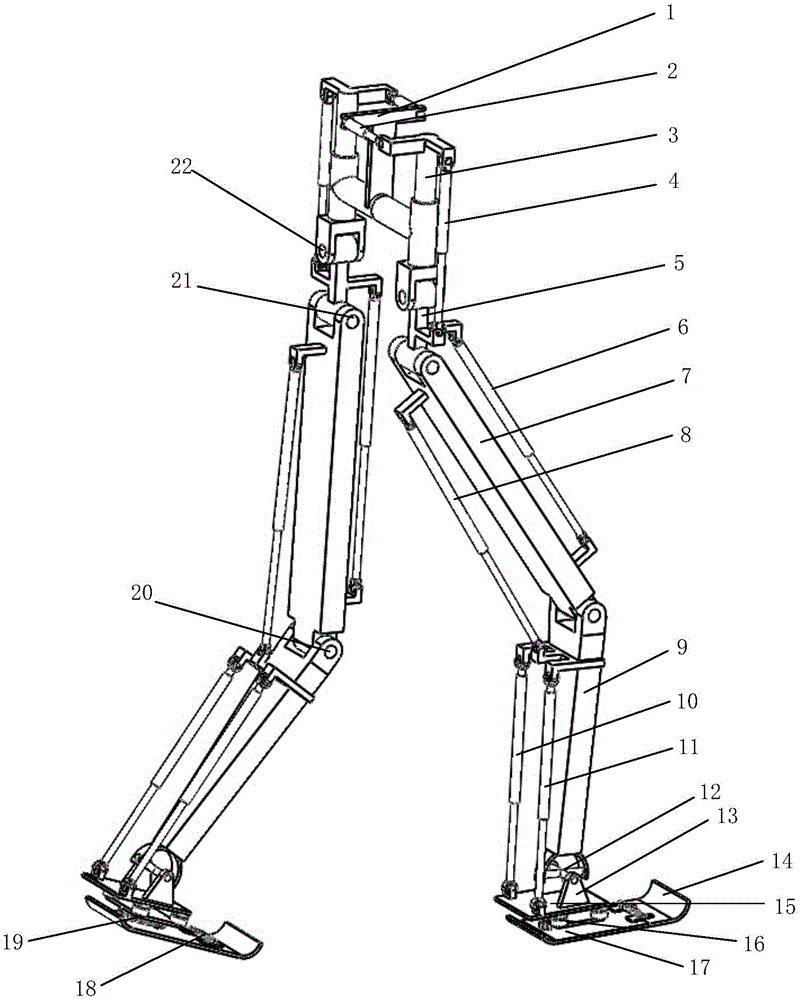
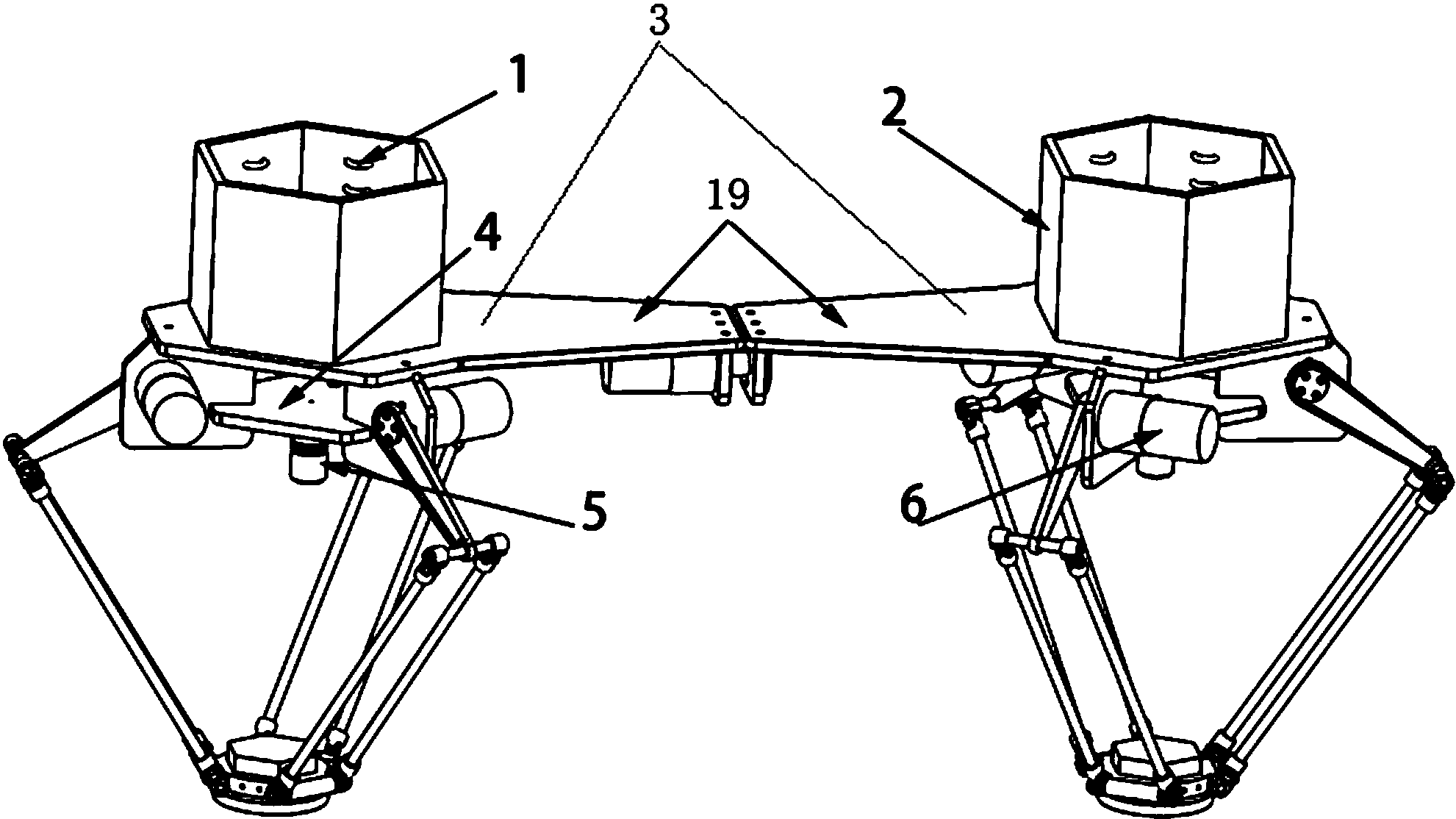
一种模块化的六自由度主动关节型双足步行机器人
图片尺寸1444x1445
一种具有重载缓振平稳功能的仿生双足行走机器人
图片尺寸398x389
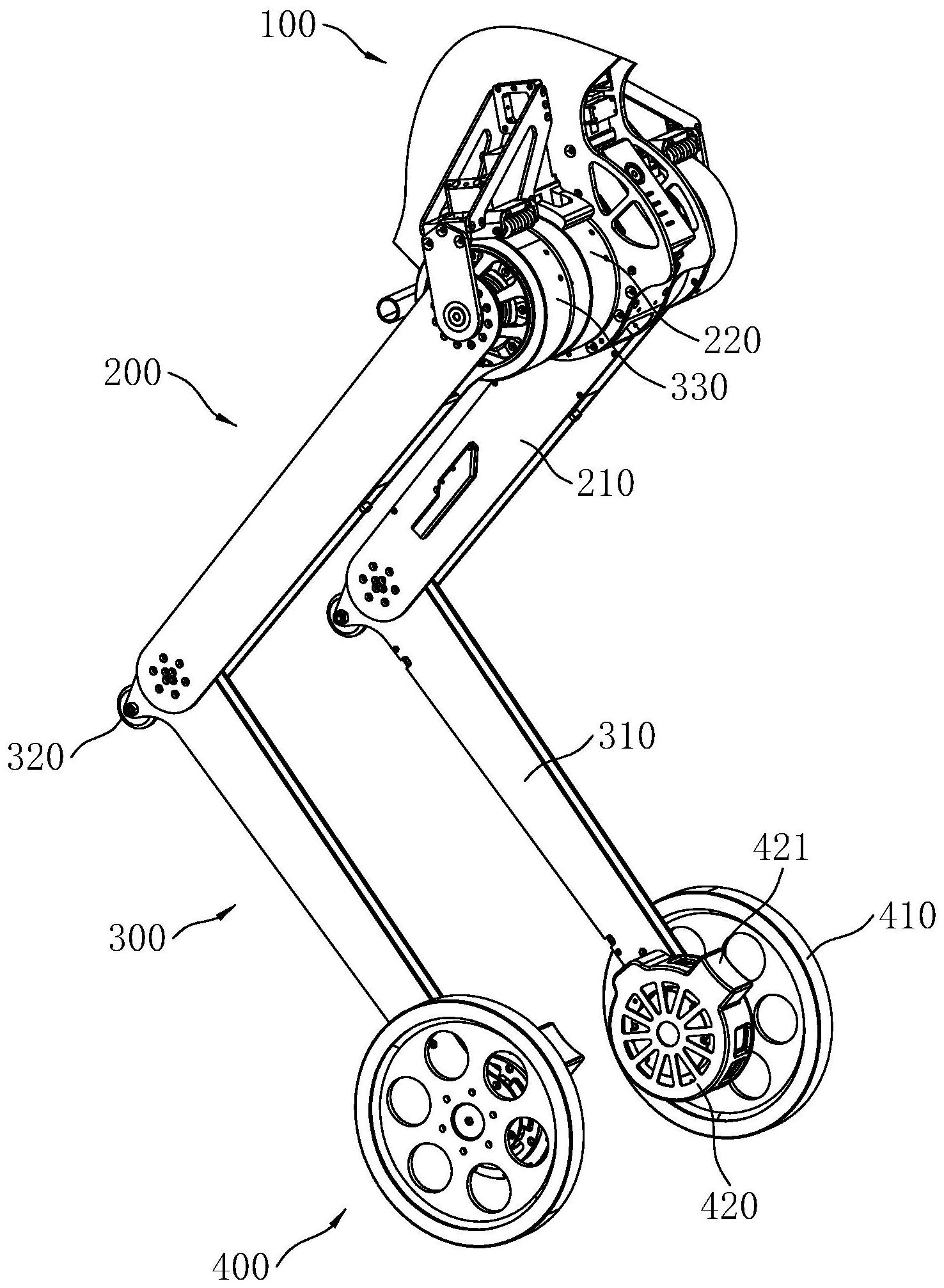
一种双足攀爬巡检机器人
图片尺寸1981x1114
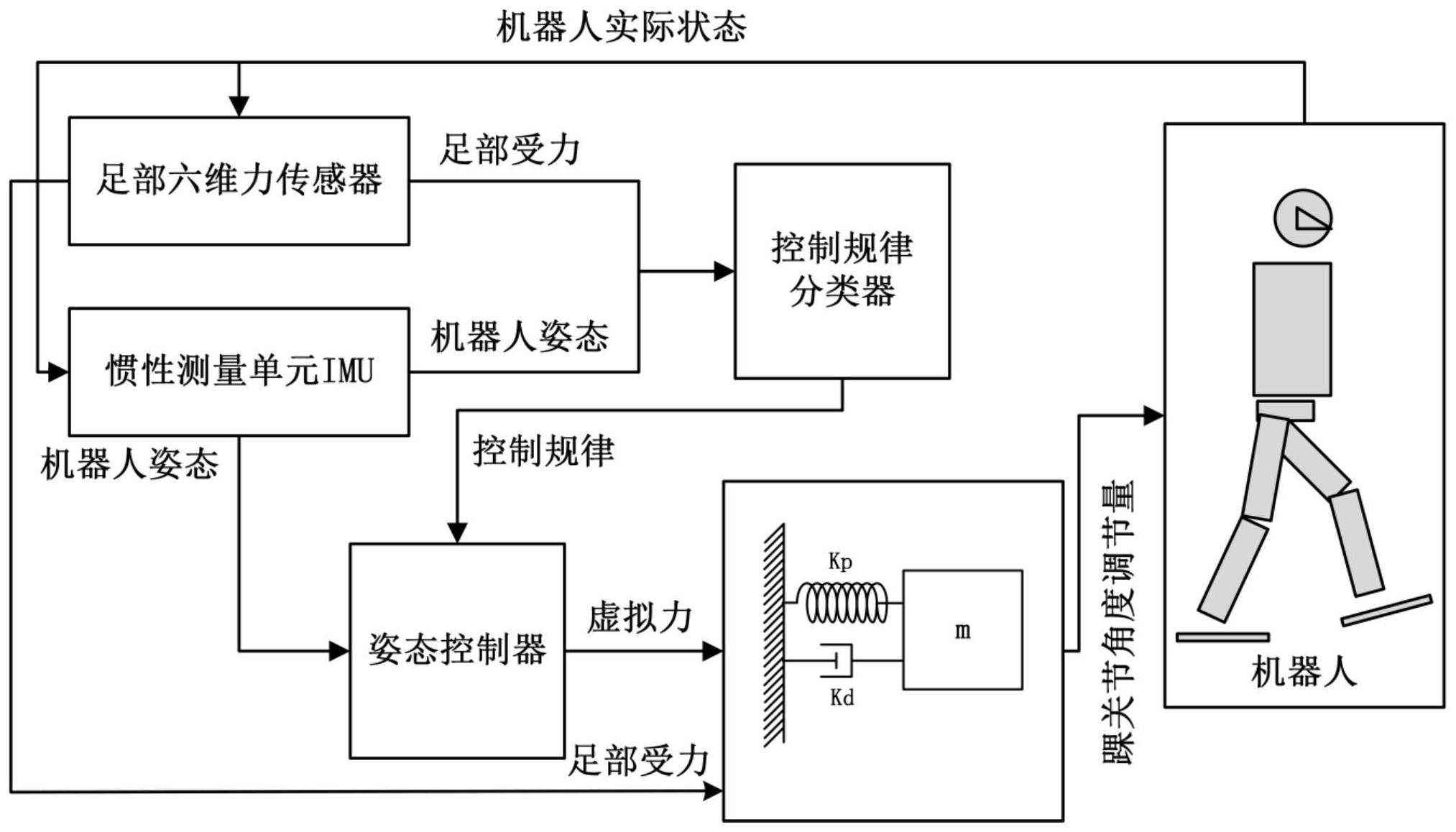
一种双足机器人足部柔顺平衡控制系统及方法
图片尺寸2026x1158
1 双足机器人mpc控制算法
图片尺寸522x556
一种双足机器人的足部结构及其全地形路面适应方法
图片尺寸1956x1417
一种仿人双足机器人机械结构的制作方法
图片尺寸908x1000
基于气动人工肌肉的双足机器人关节设计
图片尺寸438x291
一种基于涵道推进系统的双足跳跃机器人及其工作方法-爱企查
图片尺寸962x932
多姿态双足机器人
图片尺寸1476x2013
工业机器人的基本工作原理
图片尺寸640x630