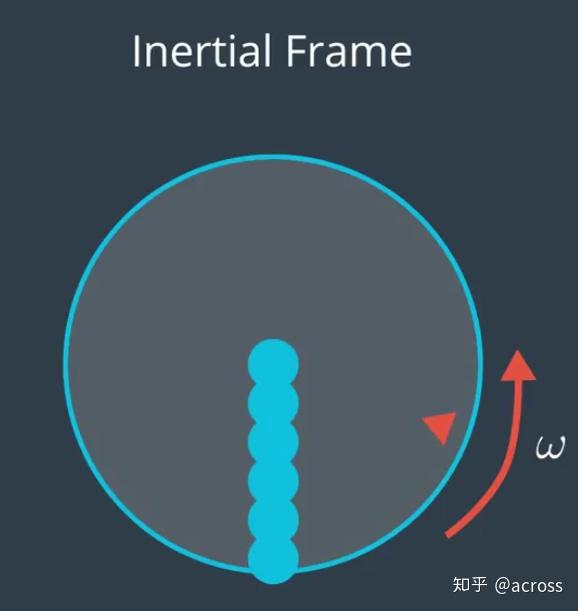
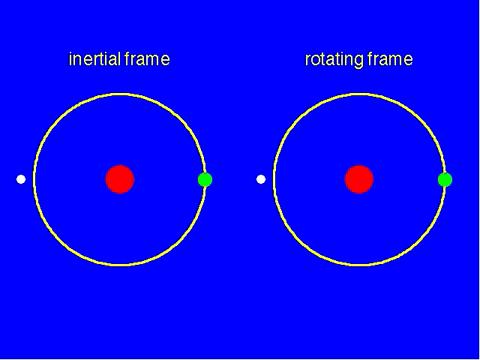
inertial frame

inertialframe
图片尺寸300x300
1 worldbody 特殊的body,作为世界的framethis element is used to
图片尺寸336x635
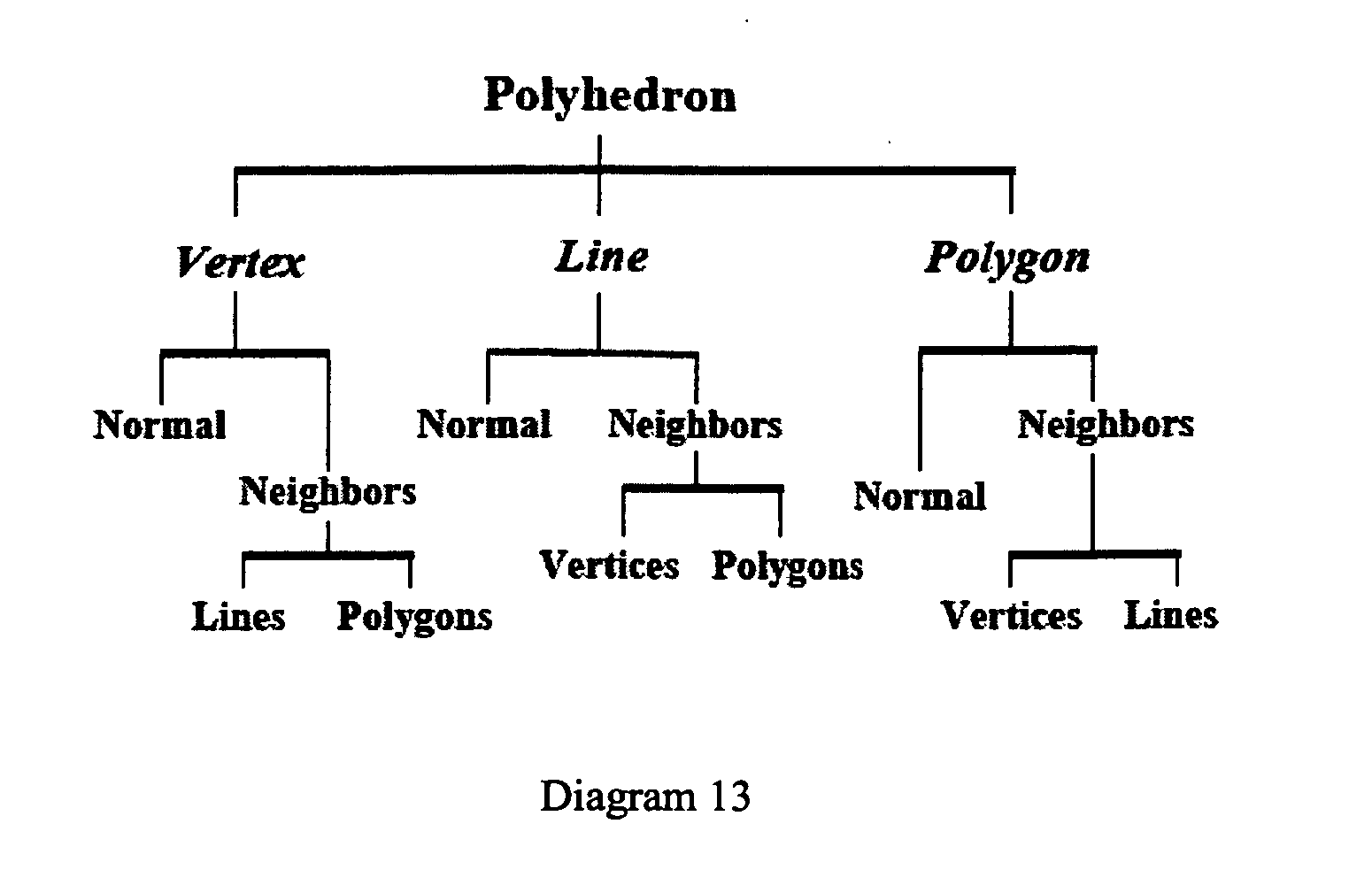
e) normal vectors in the inertial frame for each primitive
图片尺寸1550x983
inertial reference frame ($x, y, z, t$) moving radially with
图片尺寸432x347
across的飞控笔记之状态估计 第二课 传感器知识
图片尺寸578x611
and direction of rotation axis are fixed relative to a inertial
图片尺寸1080x810
获取的影像数据共214*5(1070)张; 本次pos解算采用waypointinertial
图片尺寸1154x631
机体坐标系(aircraft-body coordinate frame)sb-------oxyz④yg轴在
图片尺寸277x425
trinity自主飞控系统,自动化空域感知系统,三重惯性测量单元(inertial
图片尺寸900x1200
wgangp学习笔记从理论到pytorch实践
图片尺寸648x440
【翻译】slam|hybrid, frame and event based visual inertial
图片尺寸413x427
ins-dh-oem美国inertial labs公司已发布了适用于无人机,直升机和激光
图片尺寸540x330
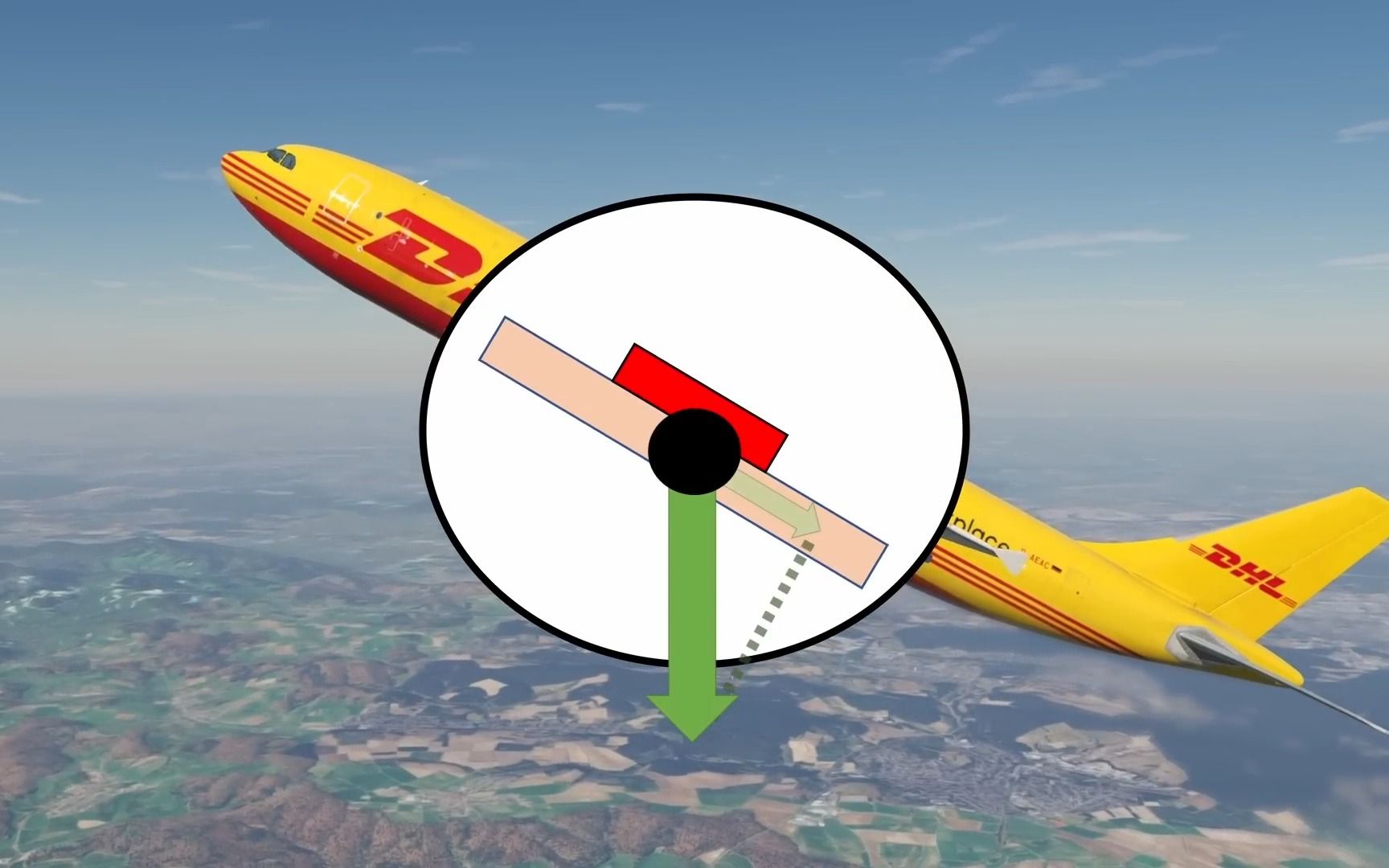
when viewed in an inertial reference frame, an object either
图片尺寸300x300
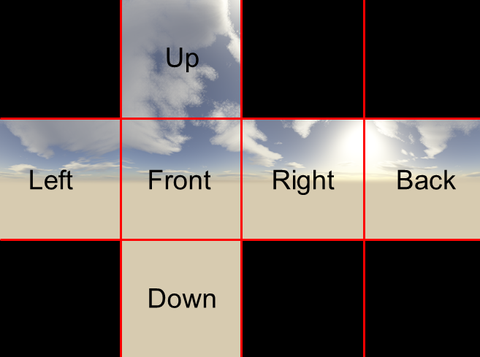
curved road 3d environment - matlab - mathworks 中国
图片尺寸524x578
the genius of inertial navigation systems explained
图片尺寸1728x1080
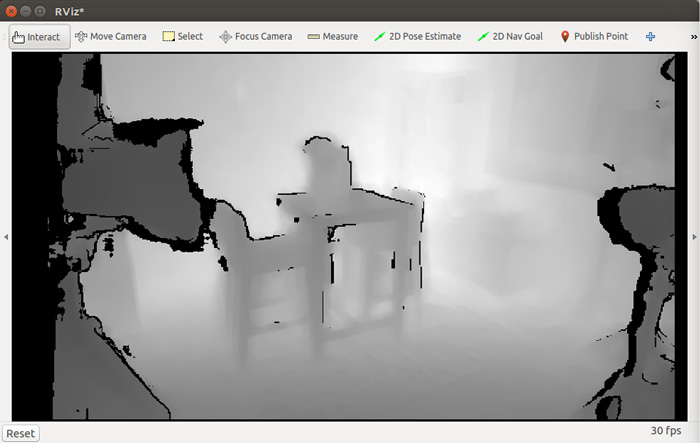
话题zed/zed_node/odom: odometry pose referred to odometry frame
图片尺寸700x443
地球轨道上再有一个地球会发生什么和你想象的可能完全不一样
图片尺寸480x360
amr实现高精定位,智游者推出工业级imu模组zyh143 imu全称inertial
图片尺寸800x626
(world)body组件下属组件:inertial, joint, freejoint, geom, site
图片尺寸430x320
二极管激光器(上图),到足球场大小的钕玻璃激光器(下图),用于inertial
图片尺寸420x540