stewart机构

平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度
图片尺寸470x290
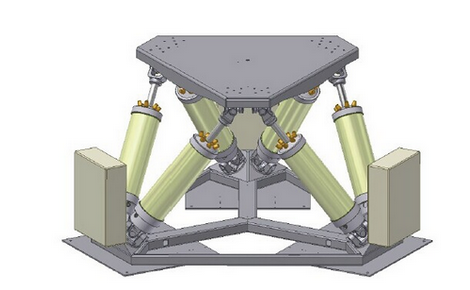
(6自由度-s6)经典的 stewart 并联机构,轻松实现空间 6自由度运动
图片尺寸950x1080
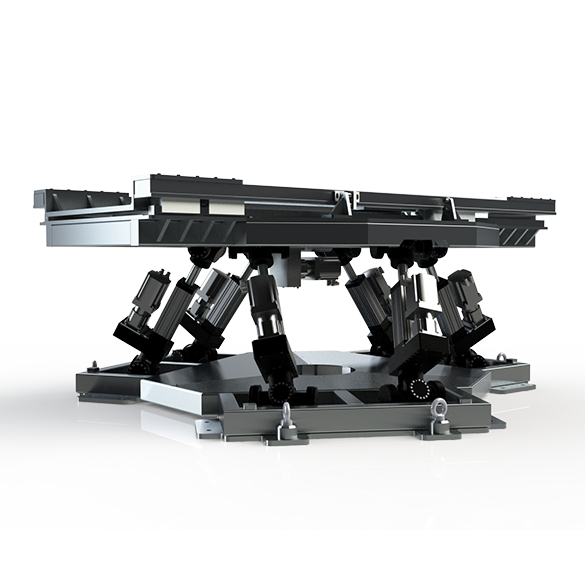
机器人高精度高稳定性低成本大负载 产品介绍 经典的stewart并联机构
图片尺寸585x574
产品图片
图片尺寸395x387
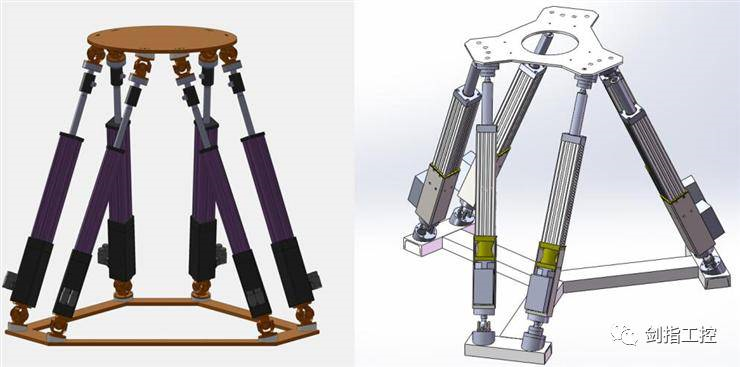
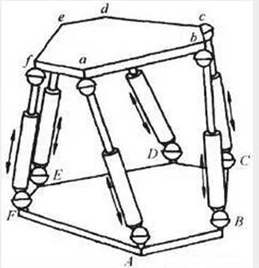
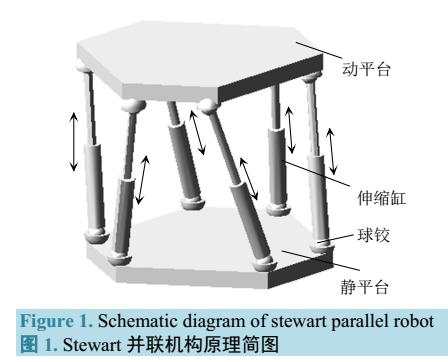
个伸缩缸以及上下各6个虎克铰(或球铰)组成6-6形机构,称为stewart平台
图片尺寸740x367
丽莎老师讲机器人之能让fast看得更清楚的机器人声音
图片尺寸580x386
而不同用途的 stewart-gough 平台构型设计也不同,作为隔振平台时
图片尺寸354x532
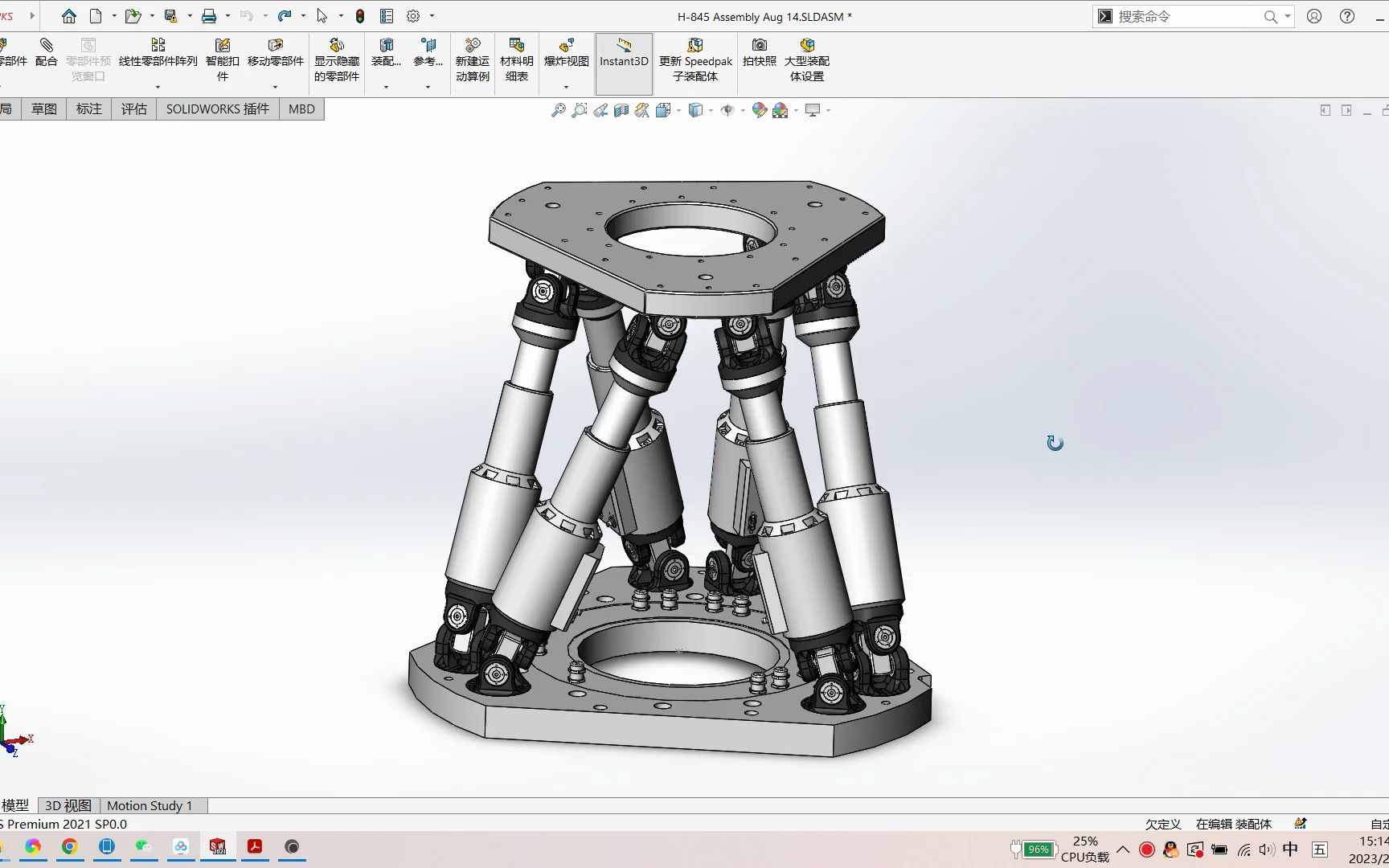
h-845六足stewart平台并联机构3d模型图纸
图片尺寸1728x1080
新闻中心 行业新闻 3自由度并联机构种类较多,形式较复杂,一般
图片尺寸500x367
由于其刚度高和重负载的优点,stewart机器人常被用于各种重载的模拟台
图片尺寸259x268
并联机构的典型应用▼01 运动模拟器▲波音747飞行模拟器▲波音737
图片尺寸580x386
它是一台以stewart平台为基础的5坐标立式加工中心,标志
图片尺寸285x300
看不厌的机械工作动态图让你长见识的原理图147
图片尺寸360x293
c4d精选参考动态 (36)_图片_gif - 图库-爱给网
图片尺寸360x307
stewart并联机器人模糊自适应pid控制仿真
图片尺寸448x362
stewart并联机器人仿真运动学逆解matlab/simscape
图片尺寸1160x725
stewart并联机器人运动学逆解可视化仿真
图片尺寸1378x999
所有空间机构的原型-stewart机构
图片尺寸457x478
gough- stewart机构
图片尺寸197x220
自由度计算 1) 自由度(degree of freedom, dof) : stewart平台有18
图片尺寸1080x810












猜你喜欢:stewart平台marthastewart品牌MarthaStewartKristenStewartJamesStewartkristenstewart壁纸rodStewartStewartBillyStewartStewart幕布机构机械机构升降机构辅导机构凸轮机构美术培训机构双曲柄机构机构简图艺考培训机构四杆机构曲柄摇杆机构mcn机构机构运动简图连杆机构曲柄滑块机构托育机构翻转机构偏心轮机构运动简图铰链四杆机构机构信用代码证小韩红徐婧彭于晏激战训练壁纸中山旅游景点云朵蛋糕图片宝贝一家亲主题墙醉观公园液压履带式强夯机nice表情包 外国 gif初号机微信头像丽新电视机顶盒血液循环图高清学士服领带怎么穿